|
Öffentliche, statische Methoden |
| static void | construct (System::String^port_name) |
| | Konstruktor für RobotControl.
|
| static void | serialPort_DataReceived (System::Object^sender, System::IO::Ports::SerialDataReceivedEventArgs^e) |
| | Ereignisfunktion für seriell empfangenes Zeichen.
|
| static System::String | getComPortName (void) |
| | Gibt den Bezeichner der gegenwärtig verwendeten seriellen Schnittstelle an.
|
| static array< System::String^, 1 > | getComPortNames (void) |
| | Gibt alle Comports des Systems als Stringarray zurück.
|
| static System::String | getServoDescription (int servoNumber) |
| | Gibt den Bezeichner eines Servokanals zurück.
|
| static int | getServoMinValue (int servoNumber) |
| | Gibt den Minimalwert eines Servokanals zurück.
|
| static int | getServoMaxValue (int servoNumber) |
| | Gibt den Maximalwert eines Servokanals zurück.
|
| static int | getServoStartValue (int servoNumber) |
| | Gibt den Startwert eines Servokanals zurück.
|
| static void | setMouthSilentViseme (void) |
| | Methode um Mund und Kiefer in Ruhestellung zu bringen.
|
| static void | setServosEnable (bool enabled) |
| | Sendet Befehl an die Mikrocontrollerplatine um die Servostromversorgung an- oder auszuschalten.
|
| static void | setBlinkingThreadPaused (bool paused) |
| | Funktion um das Augenblinzeln zu unterbrechen oder wieder zu starten.
|
| static void | setEarTremorThreadPaused (bool paused) |
| | Funktion um das Wackeln mit den Ohren zu unterbrechen oder wieder zu starten.
|
| static void | setVisualAdjustmentThreadPaused (bool paused) |
| | Funktion um die Ausrichtung des Roboters nach Gesichtern zu unterbrechen oder wieder zu starten.
|
| static void | setMouthMovementEnabled (bool enabled) |
| | Funktion um Mundbewegungen beim Sprechen zu aktivieren oder zu deaktivieren.
|
| static void | initiateRobot (void) |
| | Fährt alle Servos in Startposition.
|
| static void | setCamera (int camera) |
| | Zum Umschalten der Kameras.
|
| static void | showDisplay (String^text) |
| | Sendet einen Text zur Ausgabe auf dem Display an die Mikrocontrollerplatine.
|
| static SpeechLib::_ISpeechVoiceEvents_VisemeEventHandler | getVisemeEventHandler (void) |
| | Methode um den EventHandler für Phoneme dieser Klasse zurückzugeben.
|
| static void | destroy () |
| | Destruktor der Klasse RobotControl.
|
Statische öffentliche Attribute |
| static const int | LEFT = 1 |
| static const int | TOP = 1 |
| static const int | RIGHT = 0 |
| static const int | BOTTOM = 0 |
| static const int | CENTER = 2 |
| static const int | STOPPED = 0 |
| static const int | RUNNING = 1 |
| static const int | PAUSED = 2 |
| static const int | SURPRISED = 0 |
| static const int | HAPPY = 1 |
| static const int | ANGRY = 2 |
| static const int | CONTENT = 3 |
| static const int | STERN = 4 |
| static const int | FEAR = 5 |
| static const int | SAD = 6 |
| static int | used_eye |
Private, statische Methoden |
| static void | blink (void) |
| | Kurzes Blinzeln mit beiden Augen.
|
| static void | earTremorISR (void) |
| | Threadfunktion, lässt den Roboter in unregelmäßigen Intervallen mit den Ohren wackeln.
|
| static void | visualAdjustmentThreadISR (void) |
| | Threadfunktion, sorgt dafür, dass sich der Roboter auf das größte gefundene Gesicht ausrichtet.
|
| static System::String | findComport (System::String^start_port_for_search) |
| | Durchsucht alle Com-Schnittstellen nach dem Roboter.
|
| static void | initiateServoSettings (void) |
| | Erstellt und initialisiert das Array servos.
|
| static void | setServoValue (int servo_nr, int servo_speed, int servo_value) |
| | Sendet eine Positionsvorgabe für ein Servo an die Servocontrollerkarte.
|
| static void | setEyeOpen (int eye, bool eyeOpened) |
| | Öffnen oder Schliessen der Augenlider.
|
| static void | readServoSettings (void) |
| | Liest die Servoeinstellungen aus XML-Datei ein.
|
| static void | speechVisemeEvent (int streamNumber, System::Object^streamPosition, int duration, SpeechLib::SpeechVisemeType nextVisemeID, SpeechLib::SpeechVisemeFeature feature, SpeechLib::SpeechVisemeType currentVisemeId) |
| | Ereignismethode, die beim Sprechen eines Phonem aufgerufen wird.
|
Statische private Attribute |
| static array< double > | emotion |
| static array< Servo^> | servos |
| static bool | isSerialPort |
| static int | visemeCount |
| static System::String | serial_port_name |
| static System::String | serial_port_received_data = "" |
| static int | blinkingState |
| static int | earTremorState |
| static int | visualAdjustmentThreadState |
| static bool | isMouthMovement |
| static int | ear_l |
| static int | ear_r |
| static int | lid_l |
| static int | lid_r |
| static int | eye_l |
| static int | eye_r |
| static int | brows |
| static int | mouth |
| static int | jaw |
| static int | turn |
| static int | pitch |
| static System::ComponentModel::IContainer | components |
| static System::IO::Ports::SerialPort | serial_Port |
| static SpeechLib::_ISpeechVoiceEvents_VisemeEventHandler | spVisemeEventHandler |
| static Threading::Thread | blinkThread |
| static Threading::Thread | earTremorThread |
| static Threading::Thread | visualAdjustmentThread |
| void RobotControl::earTremorISR |
( |
void |
|
) |
[static, private] |
Threadfunktion, lässt den Roboter in unregelmäßigen Intervallen mit den Ohren wackeln.
Dieses Verhalten ist Tieren nachempfunden, die damit Mücken verscheuchen.
Definiert in Zeile 361 der Datei RobotControl.cpp.
Benutzt ear_l, ear_r, earTremorState, LEFT, RUNNING, servos, setServoValue() und STOPPED.
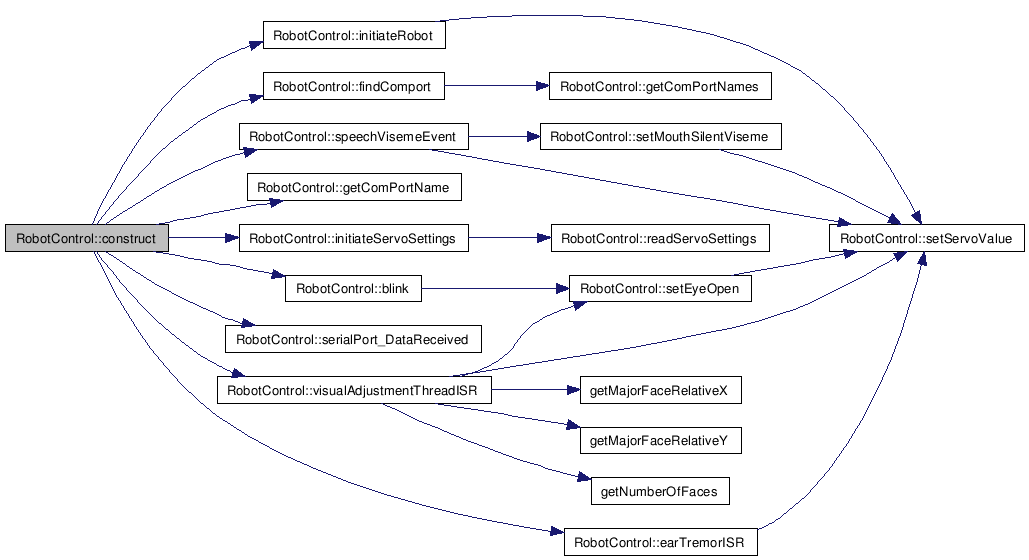
Wird benutzt von construct().
Hier ist ein Graph der zeigt, was diese Funktion aufruft:

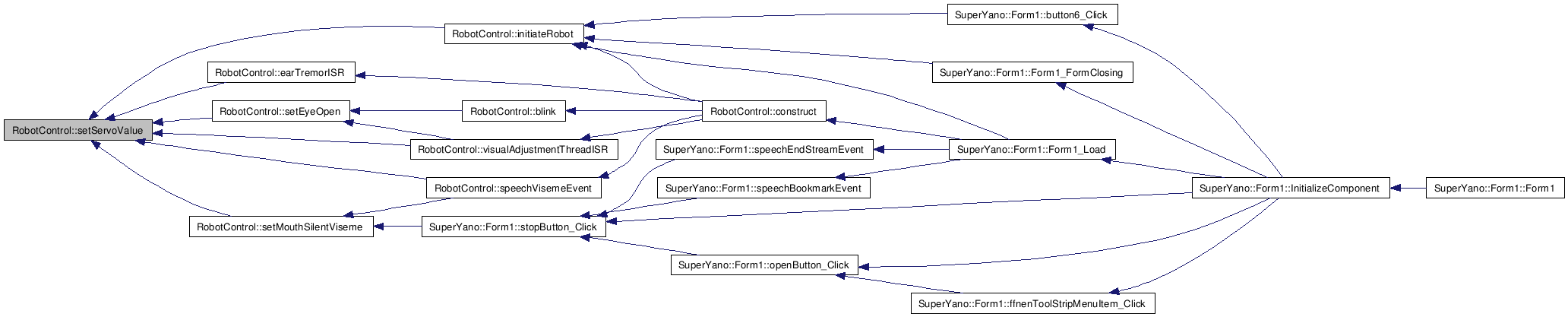
Hier ist ein Graph der zeigt, wo diese Funktion aufgerufen wird:

| void RobotControl::visualAdjustmentThreadISR |
( |
void |
|
) |
[static, private] |
Threadfunktion, sorgt dafür, dass sich der Roboter auf das größte gefundene Gesicht ausrichtet.
Wenn das Gesicht nicht in der Mitte des Bildes ist, werden zuerst die Augen bewegt. Reicht das nicht, wird auch der Kopf bewegt.
Definiert in Zeile 189 der Datei RobotControl.cpp.
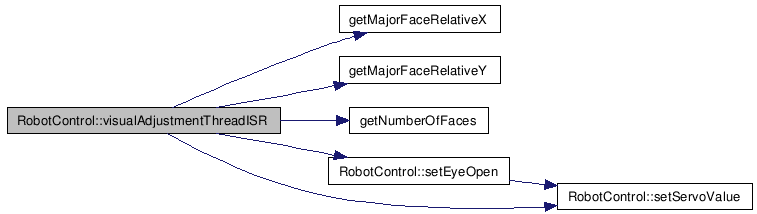
Benutzt eye_l, eye_r, getMajorFaceRelativeX(), getMajorFaceRelativeY(), getNumberOfFaces(), LEFT, pitch, RIGHT, RUNNING, servos, setEyeOpen(), setServoValue(), STOPPED, turn, used_eye und visualAdjustmentThreadState.
Wird benutzt von construct().
Hier ist ein Graph der zeigt, was diese Funktion aufruft:
Hier ist ein Graph der zeigt, wo diese Funktion aufgerufen wird:

| System::String RobotControl::findComport |
( |
System::String^ |
start_port_for_search |
) |
[static, private] |
Durchsucht alle Com-Schnittstellen nach dem Roboter.
Sobald eine Schnittstelle auf den Befehl "U!SCVER?" mit "U!SCVER?\r1.4" antwortet, ist der Roboter gefunden und die Suche beendet.
- Parameter:
-
| start_port_for_search | (String^) Bezeichner des Ports, an dem zuerst gesucht werden soll. |
- Rückgabe:
- Gibt den Bezeichner des Comports zum Roboter zurück oder "" wenn keine Roboter gefunden wurde.
Definiert in Zeile 629 der Datei RobotControl.cpp.
Benutzt getComPortNames(), serial_Port und serial_port_received_data.
Wird benutzt von construct().
Hier ist ein Graph der zeigt, was diese Funktion aufruft:

Hier ist ein Graph der zeigt, wo diese Funktion aufgerufen wird:

| void RobotControl::readServoSettings |
( |
void |
|
) |
[static, private] |
Liest die Servoeinstellungen aus XML-Datei ein.
Die Einstellungen sind in der Datei super-yano.xml hinterlegt
Definiert in Zeile 792 der Datei RobotControl.cpp.
Benutzt brows, ear_l, ear_r, eye_l, eye_r, jaw, lid_l, lid_r, mouth, pitch, servos und turn.
Wird benutzt von initiateServoSettings().
Hier ist ein Graph der zeigt, wo diese Funktion aufgerufen wird:

| void RobotControl::speechVisemeEvent |
( |
int |
streamNumber, |
|
|
System::Object^ |
streamPosition, |
|
|
int |
duration, |
|
|
SpeechLib::SpeechVisemeType |
nextVisemeID, |
|
|
SpeechLib::SpeechVisemeFeature |
feature, |
|
|
SpeechLib::SpeechVisemeType |
currentVisemeId | |
|
) |
| | [static, private] |
Ereignismethode, die beim Sprechen eines Phonem aufgerufen wird.
Abhängig vom Phonem werden Kiefer und Mundwinkel bewegt.
- Parameter:
-
| streamNumber | (int) gibt des Stream, von dem Phonem gesprochen wird an (wird nicht gebraucht) |
| streamPosition | (Object^) gibt die aktuelle Position im Stream an (wird nicht gebraucht) |
| duration | (int) gibt die Dauer des Phonem an (wird nicht gebraucht) |
| nextVisemeID | (SpeechVisemeType) gibt die ID des darauffolgenden Phonem an (wird nicht gebraucht) |
| feature | (SpeechVisemeFeature) gibt mögliches Feature des Phonem an (wird nicht gebraucht) |
| currentVisemeId | (SpeechVisemeType) gibt die Art dieses Phonems an |
Definiert in Zeile 486 der Datei RobotControl.cpp.
Benutzt isMouthMovement, jaw, mouth, setMouthSilentViseme(), setServoValue() und visemeCount.
Wird benutzt von construct().
Hier ist ein Graph der zeigt, was diese Funktion aufruft:

Hier ist ein Graph der zeigt, wo diese Funktion aufgerufen wird: